Anschluss IPC
Pick & Place
Video Tutorials
Tutorial (07:31 min)
Setup und Netzwerk

In diesem Video wird gezeigt, wie man den Industrie-PC (IPC) mit dem Maschinennetzwerk des Roboters und der Kamera verbindet, sowie alle erforderlichen Netzwerkparameter eingibt.
00:00 Komponenten
00:41 Wahl der Netzwerktopologie
01:32 Konfiguration
04:14 Verkabelung
05:12 Testen der Verbindung
Tutorial (05:55 min)
Anlernen von Objekten
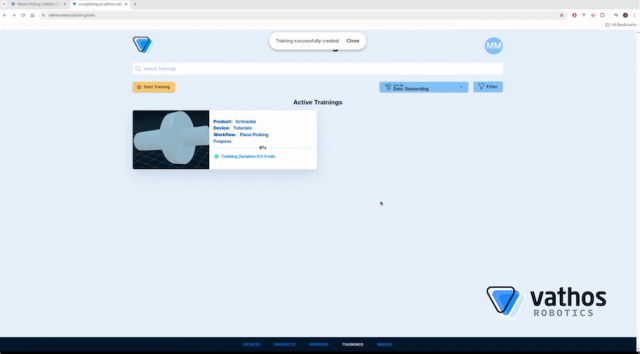
Das Video zeigt, wie man Objekte anlernt, wenn das Erkennungsmodell entsprechend trainiert werden muss. Zudem wird gezeigt, wie man einen für das Objekt passendes Greifermodell anlegt.
00:00 Einleitung
01:09 Vorbereitung des Greifermodells
02:00 Upload des Greifermodells
03:05 Upload des Objektmodells
04:10 Aufnahme des Kalibrierbilds
04:50 Training starten
Tutorial (16:45 min)
Objekterkennung
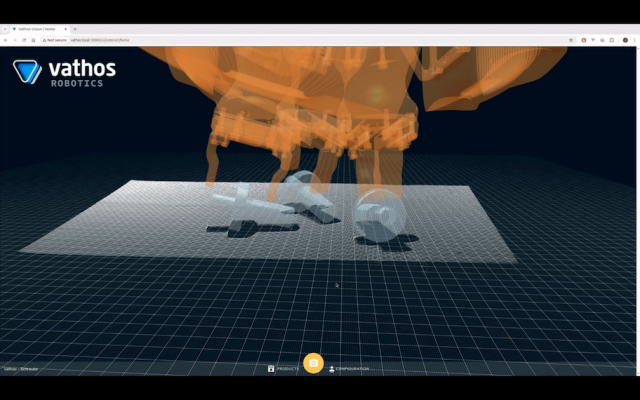
Hier wird die eigentliche Objekterkennung gezeigt. Zunächst werden dafür an einem Objekt ein oder mehrere Greifpunkte gesetzt. Im Anschluss wird die Integration der Objekterkennung in einem Roboterprogramm (hier Universal Robots) durchgeführt.
00:00 Einleitung
00:50 Setzen von Griffen
03:10 Testen der Erkennung mit Hilfe der App
04:02 Konfiguration von Basen und Tools
06:45 Initialisierung des Roboterprogramms
10:05 Programmierung der Abholbewegung
Tutorial (4:10 min)
Hand-Auge-Kalibrierung

Dieses Video behandelt die Hand-Auge-Kalibrierung, um Roboter- und Kamerakoordinatensystem aufeinander abzustimmen.
00:00 Einleitung
01:25 Kalibriermuster
02:12 Teach-In der Kalibrierposen
03:50 Erstellung des Kalibrierprogramms
12:43 Validierung des Ergebnisses